- 上一章我们介绍了如果通过树莓派device tree,将在ds18b20添加到linux系统中,并通过命令行读取温度数据,这一章我们也通过device tree添加红外接收lirc为linux系统中红外遥控的软件,树莓派系统已经有这个模块,我们只需设置一下就而已使用。
sudo vi /boot/config.txt
在文件后面添加下面这一行
dtoverlay=lirc-rpi,gpio_in_pin=18
- 红外默认输出是18管脚,如果红外接收头接到其他管脚则需修改对应管脚,(管脚为BCM编码),Pioneer 600接收头默认接到18管脚故只需要添加
dtoverlay=lirc-rpi
在/boot/overlay/README文件中我们可以找到详细说明。

安装lirc软件
sudo apt-get install lirc
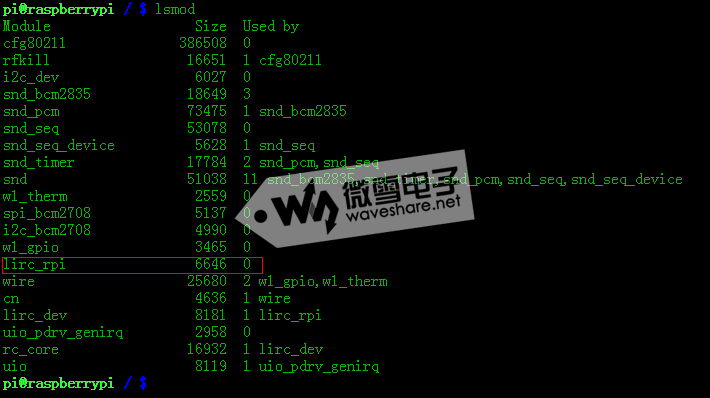
运行lsmod命令查看设备是否已启动,如若没有找到可运行sudo modprobe lirc_rpi加载驱动。
运行sudo mode2 –d /dev/lirc0,按遥控上任何键,查看是否接到到类似脉冲。
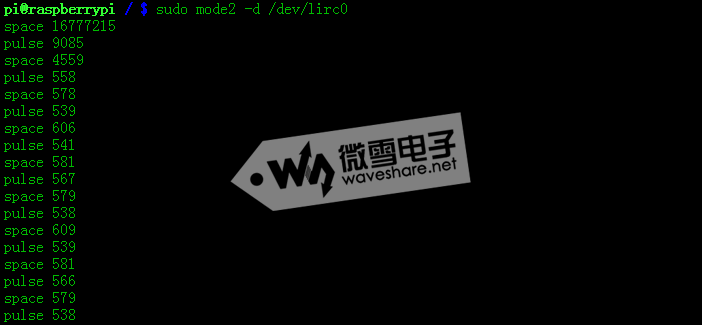
- 如有接到到脉冲测lirc正常使用。
采用脉宽调制的串行码,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的”0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的”1
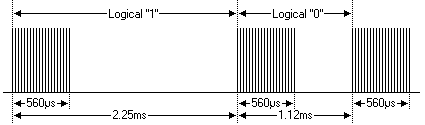
协议:
上述“0”和“1”组成的32位二进制码经38kHz的载频进行二次调制以提高发射效率,达到降低电源功耗的目的。然后再通过红外发射二极管产生红外线向空间发射,如下图。
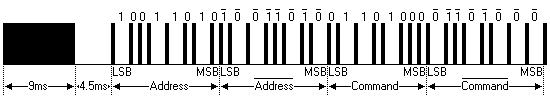
| 引导码 | 用户识别码 |用户识别码反码 | 操作码 | 操作码反码 |
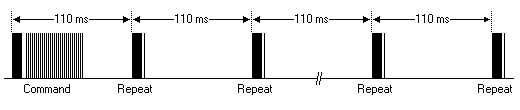
一个命令只发送一次,即使遥控器上的按键一直按着。但是会每110mS发送一次代码,直到遥控器按键释放。
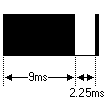
重复码比较简单:一个9mS的AGC脉冲、2.25mS间隔、560uS脉冲。
bcm2835程序:
cpp代码:
#include <bcm2835.h>
#include <stdio.h>
#define PIN 18
#define IO bcm2835_gpio_lev(PIN)
unsigned char i,idx,cnt;
unsigned char count;
unsigned char data[4];
int main(int argc, char **argv)
{
if (!bcm2835_init())return 1;
bcm2835_gpio_fsel(PIN, BCM2835_GPIO_FSEL_INPT);
bcm2835_gpio_set_pud(PIN, BCM2835_GPIO_PUD_UP);
printf("IRM Test Program ... \n");
while (1)
{
if(IO == 0)
{
count = 0;
while(IO == 0 && count++ < 200) //9ms
delayMicroseconds(60);
count = 0;
while(IO == 1 && count++ < 80) //4.5ms
delayMicroseconds(60);
idx = 0;
cnt = 0;
data[0]=0;
data[1]=0;
data[2]=0;
data[3]=0;
for(i =0;i<32;i++)
{
count = 0;
while(IO == 0 && count++ < 15) //0.56ms
delayMicroseconds(60);
count = 0;
while(IO == 1 && count++ < 40) //0: 0.56ms; 1: 1.69ms
delayMicroseconds(60);
if (count > 25)data[idx] |= (1<1<<cnt);
if(cnt== 7)
{
cnt=0;
idx++;
}
else cnt++;
if(data[0]+data[1] == 0xFF && data[2]+data[3]==0xFF) //check
printf("Get the key: 0x%02x\n",data[2]);
}
}
}
bcm2835_close();
return 0;
}
编译并执行,按下遥控按键,终端会显示接到到按键的键值。
gcc -Wall irm.c -o irm -lbcm2835
sudo ./irm

python代码:
#!/usr/bin/python
# -*- coding:utf-8 -*-
import RPi.GPIO as GPIO
import time
PIN = 18;
GPIO.setmode(GPIO.BCM)
GPIO.setup(PIN,GPIO.IN,GPIO.PUD_UP)
print('IRM Test Start ...')
try:
while True:
if GPIO.input(PIN) == 0:
count = 0
while GPIO.input(PIN) == 0 and count < 200: #9ms
count += 1
time.sleep(0.00006)
count = 0
while GPIO.input(PIN) == 1 and count < 80: #4.5ms
count += 1
time.sleep(0.00006)
idx = 0
cnt = 0
data = [0,0,0,0]
for i in range(0,32):
count = 0
while GPIO.input(PIN) == 0 and count < 15: #0.56ms
count += 1
time.sleep(0.00006)
count = 0
while GPIO.input(PIN) == 1 and count < 40: #0: 0.56mx
count += 1 #1: 1.69ms
time.sleep(0.00006)
if count > 8:
data[idx] |= 1>>cnt
if cnt == 7:
cnt = 0
idx += 1
else:
cnt += 1
if data[0]+data[1] == 0xFF and data[2]+data[3] == 0xFF: #check
print("Get the key: 0x%02x" %data[2])
except KeyboardInterrupt:
GPIO.cleanup();
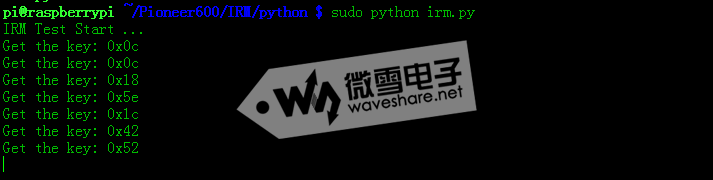
执行,按下遥控按键,终端会显示接到到按键的键值。
sudo python irm.py
| 
