- 产品详情
- 产品资料
- 配置清单
- 保修&售后服务
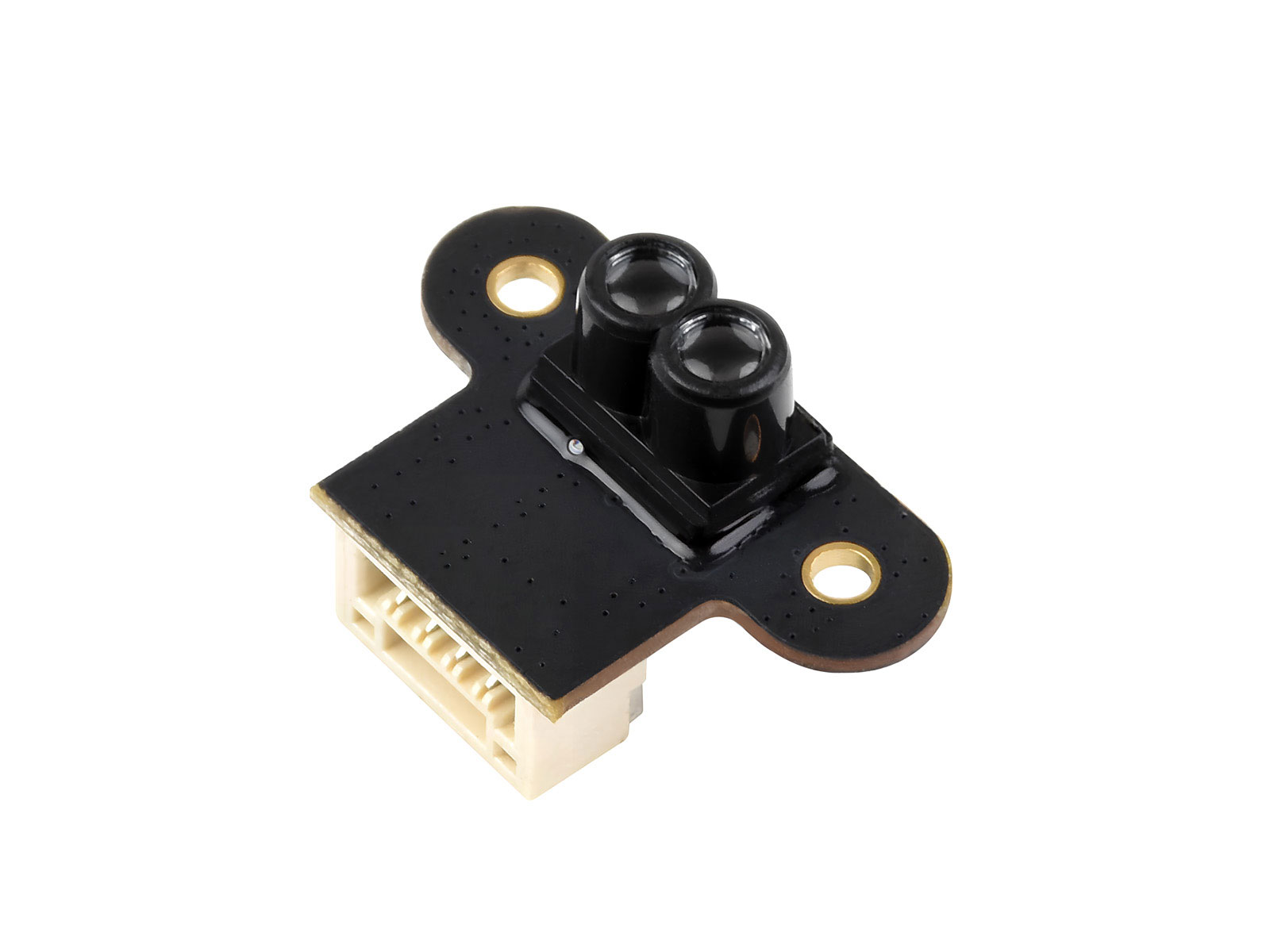
TOF 激光测距传感器
远距离 | 低盲区 | 稳定精准灵敏 | 室内外均适用

产品特性
这是一款基于 TOF (飞行时间)技术的激光测距传感器。内置控制器和测距算法,测距范围可达 7.8m,精度高达 ±4cm。支持 UART 和 I2C 通信,具备超小的 FOV 角,使得距离更远,抗光干扰能力更强,室内外环境均适用,抗环境光能力高达约 100K LUX 照度,可以作为测距工具进行距离检测,也可作为机器人避障和路线规划,还可用于天花板检测和料位测量等领域。
产品参数
| 典型测距范围 | 0.02m ~ 7.8m |
|---|---|
| 典型测距精度 | ±4cm (0.02m ~ 7.8m) |
| 波长 | 940nm |
| 视场角 (FOV) | 2° ~ 3° |
| 通信接口 | 默认:UART (TTL 信号线电平 3.3V) |
| I2C (支持并联多个,从机地址为 0x08 + 模块 ID) | |
| I/O 互补电平输出 (此模式无法提供距离参数) | |
| 通信波特率 | UART:4.8Kbps ~ 3000Kbps (默认 921.6Kbps) |
| I2C:可达 400Kbps | |
| 供电电压 | 4.3V ~ 5.2V |
| 产品功耗 | 100mW(UART 主动输出,供电电压 5.0V,电流 20mA) |
| 产品重量 | 1g |
| 工作温度 | -10°C ~ 60°C |
| 产品尺寸 | 18.8 x 12 x 10.3 (mm) (长 × 宽 × 高) |
高性价比
量程 0.02 米 ~ 7.8 米远距离低成本测距模块
高稳定、高精准、高灵敏的距离检测

支持 UART、I2C 或 I/O 接口通信
UART 模式下,支持主动查询输出
I2C 模式下,支持并联多达 8 个设备
I/O 模式下,无法输出距离

应用场景


液压堆料检测
硬件连接
接入 Raspberry Pi 主板 (以接入 I2C 为例)

接入 Raspberry Pi 主板 (以接入 UART 为例)

接入 Raspberry Pi 主板 (以接入 I/O 为例)

图片仅供展示,本产品不含以上主板或主机
外形尺寸

选型对比
| 型号 | TOF Laser Range Sensor | ||||
|---|---|---|---|---|---|
| 类型 | 基础型 | B 型 | C 型 | D 型 | Mini 型 |
| 典型测距范围 | 短距:0.012m ~ 2.16m | 0.10m ~ 15.0m | 0.05m ~ 25.0m | 0.05m
~ 50.0m | 0.02m
~ 7.8m |
| 中矩:0.012m ~ 3.60m | |||||
| 长距:0.01m ~ 5.00m | |||||
| 典型测距精度 | 短距:精度 ±1.0cm, 标准差 <0.3cm | 0.10m ~ 2m ±2cm; 2m ~ 15m ±2% | 0.05m ~ 25m ±3cm | 0.05m ~ 50m ±3cm | 0.02m ~ 7.8m ±4cm |
| 中距:精度 ±1.0cm, 标准差 <1.5cm | |||||
| 长距:精度 ±1.5cm, 标准差 <0.5cm@0.01m~3m, 标准差 <8cm@3m~5m | |||||
| 测量分辨率 | 1mm | ||||
| 供电电压 | 4.3V ~ 5.2V | 3.7V ~ 5.2V (防反接保护) | 4.3V ~ 5.2V | ||
| 工作温度 | -10°C ~ 60°C | ||||
| 波长 | 940nm (符合 Class1 标准) | 750nm ~ 830nm 激光符合 IEC 60825-1:2014 第 3 版规定的 Class2 标准 | 905nm | 940nm | |
| 视场角 (FOV) | 15° ~ 27° (多档位可调) | 1° ~ 2° | 2° ~ 3° | ||
| 通信接口 | UART (TTL 信号线电平 3.3V) | ||||
| CAN (2 个接口可同时作为 CAN 接口) | - | ||||
| - | I2C (支持并联多个,从机地址为 0x08 + 模块 ID) | ||||
| I/O 互补电平输出 | - | I/O 互补电平输出 | |||
| 通信波特率 | UART:115.2Kbps ~ 3000Kbps (默认 921.6Kbps) | UART:4.8Kbps ~ 3000Kbps (默认 921.6Kbps) | |||
| CAN:100Kbps ~ 3000Kbps (默认 100Kbps) | I2C:可达 400Kbps | ||||
| 级联数量 | UART 接口支持级联多达 8 个,CAN 接口支持级联多达 7 个 | 可通过 I2C 并联多达 8 个 | |||
| 抗环境光 | 较弱,仅支持室内用 | 约 100K LUX 照度 (室内和室外均能用) | |||
| 产品功耗 | 290mW (UART 主动输出,长距模式供电电压 5.0V,电流 58mA) | 610mW (UART 主动输出,供电电压 5.0V,电流 122mA) | 250mW (UART 主动输出,供电电压 5.0V,电流 50mA) | 100mW (UART 主动输出,供电电压 5.0V,电流 20mA) | |
| 产品重量 | 2.7g | 7.7g | 1g | ||
| 长宽高 (mm) | 35.58 × 12 × 8.05 | 22.7 × 28 × 13.6 | 18.8 × 12 × 10.3 | ||



 中国互联网
中国互联网 网络报
网络报 工商网监
工商网监